How to use the force sensor to detect objects (direction command/move until tool contact)

Vložit
- čas přidán 19. 01. 2020
- How to use the force sensor to detect objects (direction command/move until tool contact)
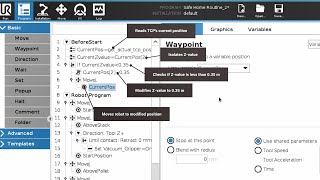
00:25 Move until tool contact with direction command
01:38 Relative waypoint
02:32 Move until tool contact with waypoint
Want to learn how to program our robots? Sign up for our free, interactive online training: academy.universal-robots.com/...
Sign up for in-class training at one of our more than 50 Authorized Training Centres located across the globe: academy.universal-robots.com/... - Věda a technologie







Is there are guidance on how you could program something like this in URScript?
Hi Abby. We don't any guidance on programming this exact example, but in the UR script manual you can find descriptions of all the different commands: help.universal-robots.com/OTHER/ScriptwebG5/Content/prod-scriptmanual/G5/The%20URScript%20Programming%20Language.htm
@@UniversalRobotsAcademy thanks for this! do you need to have a certain version for the "untill --> tool contact" option to be available? I'm currently running URSim and this option is not available for me.
How much does the simulator costs?
0! it's a free virtual machine! you can download it from the UR support Site