Video není dostupné.
Omlouváme se.
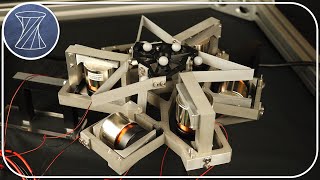
KINEMATICS | Tripod 3-DOF zero-torsion parallel robot (This is not CGI)

Vložit
- čas přidán 7. 05. 2020
- The Tripod, also known as a zero-torsion parallel mechanism, has three degrees of freedom (3DOF): translation along the z-axis, and rotation about the x-axis and y-axis. The mechanism has symmetric architecture and consists of three identical legs connected to a mobile platform via spherical joints. Revolute joints connect the other ends of the legs to prismatic actuators. Thus, the mechanism has a so-called 3-PRS structure which indicates three prismatic-revolute-spherical connections (note that in the current prototype, the revolute joint is replaced by two spherical joints, which gives the same result). The parallel architecture of the Tripod has traditionally high speed and acceleration due to the low mass of its moving parts. The Tripod is often used as a part of multi-axis positioning systems for various industrial applications.
Instagram: / olekstepanenko
GrabCAD: grabcad.com/ol...
• Project idea
• Design
• Programming
• Filming
• Music
by Oleksandr Stepanenko
#DIY #robot #tripod
In order to repost this video, you must add the following in your description (including the links below):
Created by Oleksandr Stepanenko
CZcams: / oleksandrstepanenko
LinkedIn: / olekstepanenko
Instagram: / olekstepanenko
Any modification of the video or audio in any way is not permitted.








Uh, it took me some time to realize why this one can't move in x,y (and become undefined) and mechanism with "hinges" can. Hinges obviously prevent it from rotating, but I haven't realized that hinges are still two ball joints and rods are allowed to move sideways. What makes me curious are ball joints.
I've seen yet another system with base like this, then perpendicular motorized axes is 2nd layer and top layer were wedges with groove that allowed ball joints to slide. So when bottom motors moved invards, wedges pushed plate with ball joints upwards. Hard to describe, you can google smarpod stage.
I come back to these for the beats...
I like this channel which demonstrates absolute perfectionism. I am inspired by the spirit and will do the same.
Thank you very much! I'm very happy when people are inspired by this!
One more thing, Oleksandr:
Why the orientation capability is quite limited. In my case, used my own parameters since I don't know yours, the platform rotates only +0.2 rad up and -0.2 rad down.
Hi Oleksandr,
I have simulated your manipulator via rate kinematics and position-level kinematics. Both results showed the center of the moving plate is not always at the center. How do you manage this practically? For example, the pure rotation about x-axis is always accompanied by uncontrollable x-axis translation motion.
Thanks in advance
I have no knowledge as you but if a joints are close each other it will more stable. In this design joints are joined together. (Look at Effector. There are 6 rods but effector has 3 joints) It eleminates unwanted motions.
where did you simulate this? I wanna use it too.
Are those ball magnet joints?
Hi Oleksandr, this is a very interesting project and I would like to make something similar to it, is there a a shared list of materials used to make this. Thanks
Thank you!
grabcad.com/oleksandr.stepanenko-1/models
friend, your work is excellent. I admire your work. please friend can you recomend me a material, institution or someone that teach how to create code for robotic( motion control, interpolation). I want to use ac servomotors. i see that use pulse train.
I found a lot of example of inverse kinematic, but not about code implementacion to interpolation and motion control for robotics. please friend help me. please
I am isaac from PERU
Hello, it's great. Could you tell me where I could buy those spherical joints? how much weight can it bear? And the motors, are there any with less travel? can you send me links please?
Thanks. You can find spherical joints on Amazon, just type something like: "magnetic spherical joints". It's mostly for prototyping.
can i purchase these links and glides online??
Whats is the number of links in this. Mechanism
Good question. It may look a little confusing, but those two spherical joints connected to the actuator just replacing one revolute joint, thus the mechanism has three identical legs with one revolute joint on one end and one spherical joint on the other end.
@@OleksandrStepanenko Phenomenal ball joints, are they custom. Great work.
Bro , i need a help in my project
Nice cgi animation
This is not CGI
czcams.com/video/DL2tsMJWxpk/video.html