Pendubot. Swing-up. Swing-down mimicking golf swing motion

Vložit
- čas přidán 29. 08. 2024
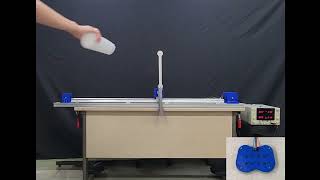
- We have built a pendubot so that lab students to conduct various control experiments. For fun, we performed swing-up and swing-down control of the pendubot. Swing-down control was done so that it mimicks golf swing motion. Control was implemented using a lab-developed LW-RCP (light-weight rapid control prototyping) and Simulink with the sample time of 1 ms. Pay attention to the fact that the first link and the second link of the pendubot form a straight line at the moment when the end of the second link hits the ball. It is just like the player's arm and the shaft of a golf club form a straight line when the head hits the ball in the golf.
연구실 학생들이 다양한 제어 실험을 할 수 있도록 Pendubot을 제작하였습니다. 재미삼아 Pendubot의 swing-up과 swing-down 제어를 수행해 보았습니다. swing-down 제어는 golf의 swing 동작을 모방하도록 수행되었습니다. 제어는 실험실에서 개발한 LW-RCP(light-weight rapid control prototyping)와 Simulink를 사용하여 1ms의 샘플 시간으로 구현되었습니다. 두 번째 link의 끝이 공에 닿는 순간, Pendubot의 첫번째 link와 두번째 link가 일직선을 이룬다는 점에 주목하세요. 이것은 Golf에서 golf head가 공을 때릴때 선수의 팔과 golf club의 shaft가 직선을 이루는 것과 같습니다.








Great application :D I'm sure you can produce some good swings with it ^^
This is so cool, I hope to learn control engineering as well as this oneday
How are you dealing with simulink latency?
Whats your interface?
We use a lab-developed rapid control prototyping system (LW-RCP) for real-time control. It is interfaced with Simulink and supports real-time control up to 2 KHz sampling frequency. For detail, refer to our paper => A light-weight rapid control prototyping system based on open source hardware, IEEE Access, vol. 5, no. 1, pp. 11118-11130, 2017.