
- 16
- 613 761
Embedded Control Lab.
Registrace 22. 07. 2011
Embedded Control Lab은 실시간 제어 system과 관련한 다양한 연구를 수행하는 인하대학교 전기공학과에 소속된 연구실입니다.
Embedded Control Lab is a laboratory performing various researches on real-time automatic control systems. It belongs to the department of electrical engineering of Inha University, Incheon, Korea.
Embedded Control Lab is a laboratory performing various researches on real-time automatic control systems. It belongs to the department of electrical engineering of Inha University, Incheon, Korea.
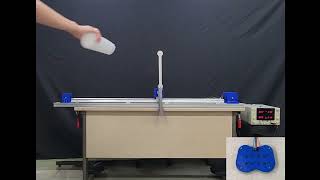
Canon in D by step motors, LW-RCP02, and Simulink
In this video, we play Canon using the vibration sound generated during the rotation of the step motors. The pulses applied to the step motors will be generated using LW-RCP02 and Simulink. LW-RCP (Light-weight Rapid Control Prototyping) is a rapid control prototyping system developed by Embedded Control Lab.
이 영상에서는 Step motor가 회전할 때 발생하는 진동음을 이용하여 Canon을 연주한다. Step motor에 인가되는 pulse는 LW-RCP02와 Simulink를 이용하여 생성한다. 참고로 LW-RCP (Light-weight Rapid Control Prototyping)은 Embedded Control Lab에서 개발한 RCP 환경이다.
이 영상에서는 Step motor가 회전할 때 발생하는 진동음을 이용하여 Canon을 연주한다. Step motor에 인가되는 pulse는 LW-RCP02와 Simulink를 이용하여 생성한다. 참고로 LW-RCP (Light-weight Rapid Control Prototyping)은 Embedded Control Lab에서 개발한 RCP 환경이다.
zhlédnutí: 1 192
Video


Pendubot. Swing-up. Swing-down mimicking golf swing motion
zhlédnutí 937Před 7 měsíci
We have built a pendubot so that lab students to conduct various control experiments. For fun, we performed swing-up and swing-down control of the pendubot. Swing-down control was done so that it mimicks golf swing motion. Control was implemented using a lab-developed LW-RCP (light-weight rapid control prototyping) and Simulink with the sample time of 1 ms. Pay attention to the fact that the fi...
World's first reinforcement learning-based transition control of a triple inverted pendulum
zhlédnutí 3,4KPřed 9 měsíci
This video shows the world's first experimental results of the transition control of a triple inverted pendulum, in which the control law was developed using a Sim-to-Real reinforcement learning approach. The control law can make every transition between different equilibrium points possible. Furthermore, it demonstrates exceptional recovery performance, a feature lacking in classical transitio...

Reinforcement learning transition control of a double inverted pendulum
zhlédnutí 1,3KPřed 10 měsíci
This video shows the experimental results of the transition control of a double inverted pendulum. The control law was developed using a Sim-to-Real reinforcement learning approach. It demonstrates exceptional recovery performance, a feature lacking in classical transition control methods. Control was implemented using LW-RCP02 (Light-weight Rapid Control Prototyping 02), which was developed by...

Reinforcement learning control of a double inverted pendulum with good recovery performance
zhlédnutí 1,5KPřed rokem
This video showcases the experimental results of the swing-up control for a double inverted pendulum. The control law was developed using a Sim-to-Real reinforcement learning approach. It demonstrates exceptional recovery performance, a feature lacking in classical swing-up control methods. Control was implemented using LW-RCP02, which was developed by Embedded Control Lab, and Simulink. The sa...
Reinforcement learning control of an inverted pendulum using Python, Simulink, and LW-RCP.
zhlédnutí 7KPřed rokem
This video shows the demonstration of reinforcement learning control of a lab-built inverted pendulum. We use Python, Matlab/Simulink, and LW-RCP(Light-weight Rapid Prototyping System) to construct the learning environment for a real inverted pendulum. Real-time data monitoring is easily supported since we use Simulink and LW-RCP, which gives better insight to a control system designer. * The L...

World's first video of 12 transition controls of a rotary double inverted pendulum
zhlédnutí 16KPřed rokem
This is the world's first experimental video about 12 transition controls that occur in a rotary double inverted pendulum (RDIP). The RDIP used for the experiment was developed by Embedded Control Lab around Dec 2022. Control was implemented using LW-RCP02, which was developed by Embedded Control Lab, and Simulink. The sampling time is 1 ms. The dynamic model of a RDIP is more complicated than ...

2-DOF magnetic levitation system
zhlédnutí 6KPřed rokem
This video shows the experimental demonstration of a 2-DOF repulsive magnetic levitation system. The levitated object can be controlled in x and y directions. Control algorithms have been constructed using Simulink with LW-RCP IO blocks used for handling inputs/outputs easily. Sampling time is 1 ms. Please enjoy the video. 2자유도 repulsive 형 자기부상 system에 대한 실험 영상입니다. 부양체는 공중에서 x와 y 방향으로 제어될 수 있습니...

World's first video of 56 transition controls for a triple inverted pendulum : 3-body problem
zhlédnutí 544KPřed 2 lety
This is the world's first experimental video about 56 transition controls that occur in a triple inverted pendulum. The triple inverted system was developed by Embedded Control Lab. Control was implemented using LW-RCP02, which was developed by Embedded Control Lab, and Simulink. The sampling time is 1 ms. * The triple inverted pendulum and LW-RCP02 can be purchased from Sungjin Techwin. For pu...
Triple inverted pendulum (Transition control)
zhlédnutí 6KPřed 2 lety
3단도립진자에서 발생하는 8개의 equilibrium points 들간의 transition을 제어하는 영상입니다. 샘플링 time은 1ms이고 제어는 Simulink와 LW-RCP02를 사용하였습니다. This video shows the demonstration of transition control between 8 equilibrium points of a triple inverted pendulum. The sampling time is 1 ms. We used Simulink and LW-RCP02 for real-time control.
Magnetic levitation system
zhlédnutí 2,7KPřed 2 lety
Magnetic levitation system에 대한 control demo 입니다. attractive magnetic force를 이용하는 형태입니다. LW-RCP unit와 Simulink를 이용하여 제어하였습니다. 동작점 기준으로 선형화하였고, Luenberger observer와 pole placement를 결합한 구조입니다. 부양체로 사용하는 음료수 병의 뚜껑에 네오디뮴 자석을 강력 접착제로 붙여 전자석에 의한 인력을 강화하였습니다. This video shows the control demonstration of a magnetic levitation system. It utilizes the attractive magnetic force for control. We used LW-RCP...
Swing-up control of a reaction wheel inverted pendulum
zhlédnutí 7KPřed 2 lety
Reaction wheel inverted pendulum에 대한 시연 동영상입니다. 제어기는 LW-RCP 장치와 Simulink를 이용하여 구현하였습니다. sampling time은 5 [ms]입니다. Extended Kalman filter를 이용하여 상태를 추정하고, 2자유도 구조(Feedforward Feedback)의 제어기로 swing-up 제어를 수행합니다. Swing-up이 이루어진 이후에는 LQ 제어기로 제어를 수행합니다. 선형 제어로 제어되는 도중 세게 손으로 밀어 바닥으로 떨어진 경우에는 Energy-based control을 이용하여 다시 swing-up 하게 됩니다. This video shows the demonstration of swing-up control of a rea...
Swing-up control of the double inverted pendulum : Simulation Vs. Experiment
zhlédnutí 6KPřed 2 lety
2단 도립진자 swing-up control의 모의실험 결과와 실제 실험 결과를 비교하는 영상입니다. 영상으로부터 실제 실험결과가 모의실험에서 나타나는 양상을 잘 나타내고 있는 것을 알 수 있습니다. This video compares the simulation results and real experimental results for the swing-up control of the double inverted pendulum. It clearly shows the experimental results show the tendency of the simulation results.
Swing-up control of a triple inverted pendulum.
zhlédnutí 2,2KPřed 2 lety
3단 도립진자의 swing-up control 실험을 보여주는 영상입니다. 3단 도립진자는 인하대학교의 Embedded Control Lab에서 자체적으로 개발되었습니다. 제어 주기는 1 [ms] 입니다. 제어 알고리즘은 LW-RCP (Light-weight Rapid control prototyping) 장치와 Simulink를 이용하여 설계되었습니다. This is the demonstration video of the swing-up control of the triple inverted pendulum, developed by Embedded Control Lab of Inha University. Sampling time is 1 [ms]. Control is performed through ...
Swing-up control of a double inverted pendulum.
zhlédnutí 1,2KPřed 2 lety
2단 도립진자의 swing-up control 실험을 보여주는 영상입니다. 2단 도립진자는 성진테크윈과 인하대학교의 Embedded Control Lab의 공동연구를 통해 개발되었습니다. 2단 도립진자는 4개의 평형점(down-down, up-down, down-up, up-up)을 가지고 있습니다. 이 영상에서는 4개의 평형점간에 발생할 수 있는 12가지 이동에 대한 제어를 수행하고 있읍니다. 제어 주기는 1 [ms] 입니다. 제어 알고리즘은 성진테크윈에서 개발한 LW-RCP (Rapid control prototyping) 장치와 Simulink를 이용하여 설계되었습니다. This is the demonstration video of the swing-up control of the double i...
I would pay money to go to the movies and watch a slow reel of the code that is driving this beautiful piece of engineering. There have to be some spectacular tricks in there.
1:20 Do you know why in ep7 the cart is shaking, and how to improve it?
I think maybe your action space is CART-LEFT and CART-RIGHT, but no CART-NEUTRAL, therefore the cart has to move either LEFT or RIGHT. It has no option to STAY!!! DON'T MOVE!!! so it is shaking.
Now on to the quadruple… get to it.
This is incredible.
I recently saw a video of balancing a double pendulum, using a machine learning program, and I shared it with my friends stating how amazing that was, only to discover this video after two days, just watching this awe and wonder, thinking how on earth is this even possible, predicting AND executing the next possible move and getting it work, so beautifully and elegantly, i get proud of being a part of the human race looking at such amazing engineering!
can this be done while it is vertical?
Which rl architecture it is,i will be trying this shortly and i have selected soft actor critic for that,will it work?
If you trained on real hardware how much time it took?, and also was the backprop on batch happening on each time step or after each episode to remove the latency introduced by batch training?
Cheating, you can see the hand behind moving the pendulum
Three sticks can't do ballet. Robot: hold my beer
Few questions please , How is the second encoder data being transferred and whats the latency
We use sliprings. Therefore, wire connection can be established. Almost, no latency.
5:43 That almost looked like a forced intermediary...
beautifull!!!
HOLY SMOKES!
Dude... That number 7 equilibrium at 2:30 minutes in. I felt my jaw drop...
any infos on the control algorithmn?
Robot magic!
Math
GREAT NOW THE CIRCUS WILL BE OPERATED BY ROBOTS :( (jk)
I can feel his frustration
This seems impossible. How?
how does the computer get position data? A camera?
Im going back to 10hrs of paint drying because at least at the end of that video I feel I got something done.
Jfc
The transitions between states 5, 6, and 7 were the ones I was most excited to see, and they did not disappoint
quite okay 👍 judging by the most viewed parts of the video, people are most impressed, when the limp thing is fully errect... whatever that tells us about the audience 🤷♂
This reminds me of old videos my grandfather would show me of triple inverted pendulums. RIP poppop
this is amazing, can anyone explain how this was done? i just came from pezzza's work (great programming channel) where he trained AI to balance double pendulum. were these controls done by an AI or a human? appreciate the answers :)
Like those videos for cats, this is a video for a gen Ai bot to watch all day.
That is so impressive
And for no reason at all, CZcams thinks I want to watch this fucking shit.
That;s really awesome, great work.
@PezzzasWork
going to 0 was always unnecesarily complicated 😂
Show this to everyone, and only a vanishingly small fraction will truly understand how weird it is that this can actually be done.
It's like watching a gymnastics routine
Work your way up the numbers and could eventually balance a bike chain on end
형님 레모나는 무슨 죄입니까
Damn
I’m sorry what? The last moment of when it transitioned from x to 0 is nuts. How it just kills all sway.
Why there is a stepper motor on the gantry? Is first link of the pendulum truly free to spin?
Trisolarans literally just had skill issue. Human supremacy 4eva!
Simone Biles better watch out. The robots are coming for her gold medals.
Amazing
pendulum binary be like
Amazing I put somethings up on Reddit grand unified theory and here on CZcams cosmo knowledge I’d love feed back it’s on the picture of the black hole
We have to stop Skynet before it's too late.
CZcams: Me: CZcams: Wanna see a robot balance a rope?
Physicist: It's impossible to predict the motion of a triple pendulum! Engineer: Gimme a month and $10,000
I wonder if this is still possible when the bars are equal length? They have increasing length here, which feels like it makes it possible to have greater control over the individual parts but that's only my intuition