
- 219
- 79 731
Multi-robot Systems Group at FEE-CTU in Prague
Czechia
Registrace 25. 02. 2015
Multi-robot Systems (MRS) group at Department of Cybernetics, Czech Technical University in Prague integrates various research disciplines required for design, implementation, experimental evaluation, and application of complex robotic systems. Research streams followed by MRS group members include motion and trajectory planning, locomotion generation, control, communication, coordination, and stabilization of groups of ground, aerial, and modular robots. More at:
mrs.felk.cvut.cz
mrs.felk.cvut.cz
Fast Swarming of UAVs in GNSS-denied Feature-poor Environments without Explicit Communication
A decentralized swarm approach for the fast cooperative flight of Unmanned Aerial Vehicles (UAVs) in feature-poor environments without any external localization and communication is introduced in this paper. A novel model of a UAV neighborhood is proposed to achieve robust onboard mutual perception and flocking state feedback control, which is designed to decrease the inter-agent oscillations common in standard reactive swarm models employed in fast collective motion. The novel swarming methodology is supplemented with an enhanced Multi-Robot State Estimation (MRSE) strategy to increase the reliability of the purely onboard localization, which may be unreliable in real environments. Although MRSE and the neighborhood model may rely on information exchange between agents, we introduce a communication-less version of the swarming framework based on estimating communicated states to decrease dependence on the often unreliable communication networks of large swarms. The proposed solution has been verified by a set of complex
real-world experiments to demonstrate its overall capability in different conditions, including a UAV interception-motivated task with a group velocity reaching the physical limits of the individual hardware platforms.
Reference:
Jiri Horyna, Vit Kratky, Vaclav Pritzl, Tomas Baca, Eliseo Ferrante and Martin Saska. Fast Swarming of UAVs in GNSS-denied Feature-Poor Environments without Explicit Communication. IEEE Robotics and Automation Letters 9(6):5284-5291, April 2024.
Preprint: arxiv.org/pdf/2404.18729
An MRS open-source research UAV platform was used for experiments presented in this video. See mrs.felk.cvut.cz/system for details and the source code of the MRS UAV platform, which enables all essential capabilities for research, development, and testing of novel methods. For publications describing the applied system and control stack, see:
- Tomas Baca, Matej Petrlik, Matous Vrba, Vojtech Spurny, Robert Penicka, Daniel Hert and Martin Saska, “The MRS UAV System: Pushing the Frontiers of Reproducible Research, Real-world Deployment, and Education with Autonomous Unmanned Aerial Vehicles,” Journal of Intelligent & Robotic Systems 102(26):1-28, May 2021.
link.springer.com/article/10.1007/s10846-021-01383-5
- D. Hert et al., "MRS Modular UAV Hardware Platforms for Supporting Research in Real-World Outdoor and Indoor Environments," 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 2022, pp. 1264-1273, doi: 10.1109/ICUAS54217.2022.983608 (ieeexplore.ieee.org/document/9836083)
This work was accomplished by the MRS group at CTU in Prague mrs.felk.cvut.cz . For more experiments with the MRS UAV research platforms, see mrs.felk.cvut.cz/publications
For mutual navigation of robots in the group, a smart UVDAR sensor developed by the MRS group at CTU in Prague mrs.felk.cvut.cz was used. For details, see:
- V Walter, N Staub, A Franchi and M Saska, “UVDAR System for Visual Relative Localization With Application to Leader-Follower Formations of Multirotor UAVs,” IEEE Robotics and Automation Letters 4(3):2637-2644, July 2019.
ieeexplore.ieee.org/document/8651535
- V Walter, N.Staub, M Saska and A Franchi, “Mutual Localization of UAVs based on Blinking Ultraviolet Markers and 3D Time-Position Hough Transform,” In 14th IEEE International Conference on Automation Science and Engineering (CASE 2018). 2018.
ieeexplore.ieee.org/document/8560384
- V Walter, M Saska and A Franchi, “Fast mutual relative localization of uavs using ultraviolet led markers,” In 2018 International Conference on Unmanned Aircraft System (ICUAS 2018). 2018.
ieeexplore.ieee.org/document/8453331
real-world experiments to demonstrate its overall capability in different conditions, including a UAV interception-motivated task with a group velocity reaching the physical limits of the individual hardware platforms.
Reference:
Jiri Horyna, Vit Kratky, Vaclav Pritzl, Tomas Baca, Eliseo Ferrante and Martin Saska. Fast Swarming of UAVs in GNSS-denied Feature-Poor Environments without Explicit Communication. IEEE Robotics and Automation Letters 9(6):5284-5291, April 2024.
Preprint: arxiv.org/pdf/2404.18729
An MRS open-source research UAV platform was used for experiments presented in this video. See mrs.felk.cvut.cz/system for details and the source code of the MRS UAV platform, which enables all essential capabilities for research, development, and testing of novel methods. For publications describing the applied system and control stack, see:
- Tomas Baca, Matej Petrlik, Matous Vrba, Vojtech Spurny, Robert Penicka, Daniel Hert and Martin Saska, “The MRS UAV System: Pushing the Frontiers of Reproducible Research, Real-world Deployment, and Education with Autonomous Unmanned Aerial Vehicles,” Journal of Intelligent & Robotic Systems 102(26):1-28, May 2021.
link.springer.com/article/10.1007/s10846-021-01383-5
- D. Hert et al., "MRS Modular UAV Hardware Platforms for Supporting Research in Real-World Outdoor and Indoor Environments," 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 2022, pp. 1264-1273, doi: 10.1109/ICUAS54217.2022.983608 (ieeexplore.ieee.org/document/9836083)
This work was accomplished by the MRS group at CTU in Prague mrs.felk.cvut.cz . For more experiments with the MRS UAV research platforms, see mrs.felk.cvut.cz/publications
For mutual navigation of robots in the group, a smart UVDAR sensor developed by the MRS group at CTU in Prague mrs.felk.cvut.cz was used. For details, see:
- V Walter, N Staub, A Franchi and M Saska, “UVDAR System for Visual Relative Localization With Application to Leader-Follower Formations of Multirotor UAVs,” IEEE Robotics and Automation Letters 4(3):2637-2644, July 2019.
ieeexplore.ieee.org/document/8651535
- V Walter, N.Staub, M Saska and A Franchi, “Mutual Localization of UAVs based on Blinking Ultraviolet Markers and 3D Time-Position Hough Transform,” In 14th IEEE International Conference on Automation Science and Engineering (CASE 2018). 2018.
ieeexplore.ieee.org/document/8560384
- V Walter, M Saska and A Franchi, “Fast mutual relative localization of uavs using ultraviolet led markers,” In 2018 International Conference on Unmanned Aircraft System (ICUAS 2018). 2018.
ieeexplore.ieee.org/document/8453331
zhlédnutí: 309
Video


Unreal Engine 5 Drone Simulator
zhlédnutí 568Před měsícem
The UE5 Drone Simulator offers the ability to simulate multiple multi-rotor UAVs with LiDAR, RGB and RGB-D cameras. The life-like visuals are ideal for testing and development of visual-based navigation methods. The Unreal Engine 5 Drone Simulator (github.com/ctu-mrs/mrs_uav_unreal_simulation) is a part of the MRS UAV System: github.com/ctu-mrs/mrs_uav_system.

Towards Safe Mid-Air Drone Interception: Strategies for Tracking & Capture
zhlédnutí 1,5KPřed 2 měsíci
In response to the security challenges posed by unauthorized UAVs, this research introduces the Fast Response Proportional Navigation (FRPN). FRPN combines the individual strengths of Pure Pursuit's responsiveness with Proportional Navigation's accuracy, offering a superior solution for safe mid-air drone interception. Our analysis, conducted over 100 maneuvering agile target trajectories, demo...
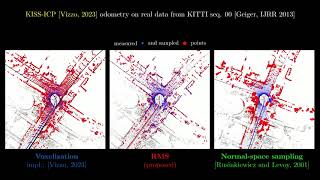
RMS: Redundancy-Minimizing Point Cloud Sampling for Real-Time Robot-Pose Estimation
zhlédnutí 456Před 4 měsíci
Supplementary materials for RA-L 2023 submission. Preprint: arxiv.org/abs/2312.07337 Code: github.com/ctu-mrs/RMS Abstract: The typical point cloud sampling methods used in state estimation for mobile robots preserve a high level of point redundancy. The point redundancy slows down the estimation pipeline and can make real-time estimation drift in geometrically symmetrical and structureless env...

A NMPC Strategy for Autonomous Racing of Scale Vehicles (SMC2022 Video Pitch)
zhlédnutí 71Před 4 měsíci
Video pitch to the paper entitled "A Nonlinear Model Predictive Control Strategy for Autonomous Racing of Scale Vehicles", accepted to SCM'22. REFERENCE: V. Cataffo, G. Silano, L. Iannelli, V. Puig, and L. Glielmo A Nonlinear Model Predictive Control Strategy for Autonomous Racing of Scale Vehicles 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC) PDF: giuseppesilano.net...

THE 2023 IEEE RAS SUMMER SCHOOL ON MULTI-ROBOT SYSTEMS
zhlédnutí 864Před 7 měsíci
A brief look into the 2023 IEEE RAS Summer School on Multi-Robot Systems, which took place in July 2023 in Prague, Czech Republic. It’s been an amazing week full of networking, interesting lectures, workshops and experiments with UAVs. We thank all our participants from all over the world for being part of this event! You can now apply for the 2024 MRS Summer School! Check out the website to se...

CTopPRM: Clustering Topological PRM for Planning Multiple Distinct Paths in 3D Environments
zhlédnutí 527Před 8 měsíci
In this paper, we propose a new method called Clustering Topological PRM (CTopPRM) for finding multiple homotopically distinct paths in 3D cluttered environments. Finding such distinct paths, e.g. going around an obstacle from a different side, is useful in many applications. Among others, using multiple distinct paths is necessary for optimization-based trajectory planners where found trajecto...

Cooperative UAV Autonomy of Dronument: New Era in Cultural Heritage Preservation
zhlédnutí 406Před 8 měsíci
Dronument (Drone & Monument): Aerial autonomy for fast and mobile digitalization of difficult-to-access interiors of historical monuments by single UAVs as well as multi-UAV teams. The autonomy is utilized in various real-world tasks, including fully-autonomous multi-robot cooperation in documentation tasks that were previously achievable only in small-scale laboratory-like conditions. More inf...

Multi-vehicle Dynamic Water Surface Monitoring
zhlédnutí 98Před 9 měsíci
Multimedia attachment of the paper "Multi-vehicle Dynamic Water Surface Monitoring" accepted for publication in RAL, June 2023. REFERENCE: Multi-vehicle Dynamic Water Surface Monitoring František Nekovář, Jan Faigl and Martin Saska © IEEE Robotics and Automation Letters (RAL), 2023 Pre-print available at: arxiv.org/abs/2302.11991 More info is available at the link: mrs.felk.cvut.cz/uavmon-ral A...
[EXP] A STL Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems
zhlédnutí 60Před 10 měsíci
Multimedia attachment of the paper "A Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems", accepted to IEEE Access. REFERENCE: A. Cabellero and G. Silano A Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems 2023 IEEE Access, vol. 11, pp. 81361-81377, July, 2023 PDF: mrs.felk.cvut.cz/dat...
[MATLAB] A STL Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems
zhlédnutí 29Před 10 měsíci
Multimedia attachment of the paper "A Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems", accepted to IEEE Access. REFERENCE: A. Cabellero and G. Silano A Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems 2023 IEEE Access, vol. 11, pp. 81361-81377, July, 2023 PDF: mrs.felk.cvut.cz/dat...
[GAZEBO] A STL Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems
zhlédnutí 38Před 10 měsíci
Multimedia attachment of the paper "A Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems", accepted to IEEE Access. REFERENCE: A. Cabellero and G. Silano A Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems 2023 IEEE Access, vol. 11, pp. 81361-81377, July, 2023 PDF: mrs.felk.cvut.cz/dat...
A Signal Temporal Logic Planner for Ergonomic Human-Robot Collaboration
zhlédnutí 60Před 11 měsíci
Multimedia attachment of the paper "A Signal Temporal Logic Planner for Ergonomic Human-Robot Collaboration", accepted to ICUAS'23. REFERENCE: Giuseppe Silano, Amr Afifi, Martin Saska, and Antonio Franchi. A Signal Temporal Logic Planner for Ergonomic Human-Robot Collaboration. 2023 International Conference on Unmanned Aircraft Systems (ICUAS) PDF: mrs.felk.cvut.cz/data/papers/ICUAS23-II.pdf DO...
Tomáš Báča - Introduction Into MRS System in ROS
zhlédnutí 256Před 11 měsíci
Tomáš Báča - Introduction Into MRS System in ROS
Ergonomic Collaboration between Humans and Robots: An Energy-Aware Signal Temporal Logic Perspective
zhlédnutí 47Před 11 měsíci
Ergonomic Collaboration between Humans and Robots: An Energy-Aware Signal Temporal Logic Perspective
Martin Saska - Presentation of the Multi-Robot Systems Group and its research
zhlédnutí 327Před rokem
Martin Saska - Presentation of the Multi-Robot Systems Group and its research
Landing a UAV in harsh winds and turbulent open waters
zhlédnutí 1,8KPřed rokem
Landing a UAV in harsh winds and turbulent open waters
Adaptive Estimation of UAV Altitude in Complex Indoor Environments
zhlédnutí 182Před rokem
Adaptive Estimation of UAV Altitude in Complex Indoor Environments
DARPA SubT Challenge Post-event Testing: UAV Pink - Urban Environment (Storeroom) - GoPro
zhlédnutí 76Před rokem
DARPA SubT Challenge Post-event Testing: UAV Pink - Urban Environment (Storeroom) - GoPro
DARPA SubT Challenge Post-event Testing: UAV Blue - Tunnel Environment
zhlédnutí 15Před rokem
DARPA SubT Challenge Post-event Testing: UAV Blue - Tunnel Environment
DARPA SubT Challenge Post-event Testing: UAV Green - Metro Station
zhlédnutí 33Před rokem
DARPA SubT Challenge Post-event Testing: UAV Green - Metro Station
DARPA SubT Challenge Post-event Testing: UAV Green - Tunnel Environment
zhlédnutí 14Před rokem
DARPA SubT Challenge Post-event Testing: UAV Green - Tunnel Environment
DARPA SubT Challenge Post-event Testing: UAV Pink - Urban Environment (Storeroom)
zhlédnutí 27Před rokem
DARPA SubT Challenge Post-event Testing: UAV Pink - Urban Environment (Storeroom)
DARPA SubT Challenge Post-event Testing: UAV Yellow - Urban Environment (Hall and Metro) - GoPro
zhlédnutí 30Před rokem
DARPA SubT Challenge Post-event Testing: UAV Yellow - Urban Environment (Hall and Metro) - GoPro
DARPA SubT Challenge Post-event Testing: UAV Green - Urban Environment (Metro station)
zhlédnutí 19Před rokem
DARPA SubT Challenge Post-event Testing: UAV Green - Urban Environment (Metro station)
DARPA SubT Challenge Post-event Testing: UAV Green - Tunnel and Cave Environment
zhlédnutí 58Před rokem
DARPA SubT Challenge Post-event Testing: UAV Green - Tunnel and Cave Environment
DARPA SubT Challenge Post-event Testing: UAV Blue - Tunnel Environment 2 - GoPro
zhlédnutí 75Před rokem
DARPA SubT Challenge Post-event Testing: UAV Blue - Tunnel Environment 2 - GoPro
DARPA SubT Challenge Post-event Testing: UAV Green - Urban Environment
zhlédnutí 21Před rokem
DARPA SubT Challenge Post-event Testing: UAV Green - Urban Environment
DARPA SubT Challenge Post-event Testing: UAV Yellow - Urban Environment
zhlédnutí 38Před rokem
DARPA SubT Challenge Post-event Testing: UAV Yellow - Urban Environment
DARPA SubT Challenge Post-event Testing: UAV Green - Tunnel and Cave Environment - GoPro
zhlédnutí 850Před rokem
DARPA SubT Challenge Post-event Testing: UAV Green - Tunnel and Cave Environment - GoPro
Cool tech
TRO paper accepted ?
This is so important research! Great work so far!
Spot the fed!
party poopers
Thank you for sharing the video!🥰 Is this algorithm applicable to non-repetitive LiDARs like Livox Avia and MID-70?
Hey, I have not tested that, unfortunately! But I'd say no unless you accumulate the data into a single Ouster-like cloud. This is because RMS requires some sort of local geometry to be available in the point cloud.
Mmmm😊
👏👏
You would need dozens of capsules to put out a real fire. We solved this problem using a new kind of extinguisher technology. Happy to collaborate.
Good eve. Do you have an email address? How can I contact you?
Hello, yes of course. Please contant our head Martin Saska: martin.saska@fel.cvut.cz
@@ctu-mrsI have written to you at the specified address.
Very helpful, can you provide the github address of the code?
Good day. Do you make robots? Do you have an email address?
Used for tunnels... right. Definitely not used to hunt humans.
Not advanced enough to figure out audio yet. ;-)
This what the gov been doing?so why only a select few are privileged to be protected.. which is worst, being on the surface during an sun event or below the surface with land shift. Thats a bad way to go…..its not who you know , its what you know to survive the event. Bad time to be alive
Gratulace! 🚀🚀🚀
"Prometheus, we are now mapping".
Good day. Do you make robots?
yes.but not for russians)
@@johndow6923 Fine. Do you have an email? I'll send you the information, take revenge on the Russians for everything.
@@Koroleva_O_A ваш конформизм и ваша глупость являются причиной того что теперь вы изгои.Hello from UA)
Congratulations to all the teams involved!
This'll be used later to hunt humans hiding in caves
It seems like every technology will be used for extermination.
Already has been used to find a missing body in a toxic cave, so yeah absolutely
gotta get your meat from somewhere 🤷♂️
or the unvaccinated
How can you create 3d map
How are doing this
Hi I am using drone , but how can I add outdoor based slam?
Your work is always inspiring!
Thank you so much
sick Minecraft map dude
Wow! Nice work.
paper?
Add subtitles?
In the video, it was noticed that the drone missed with a capsule shot, you need to accurately calculate the ballistics of the capsule. The idea is great, thanks.
Thank you for sharing.
Did you use specific hardware, i.e., RTK instead of normal GPS? And what communications module did you use?I am interested in knowing the details as I am working on something similar. Thanks.
Hi, in this experiment, we relied on RTK to have precise position estimate and the communication was done using 5GHz WiFi.
@ Can you please guide me or just give me a hint on how de wo go about executing complex control algorithms on the flight controller or the companion computer. Like I dont get how do I translate a control equation to a python code. I just don't know
@@sohaibimran381 start here - github.com/ctu-mrs/mrs_uav_system
b69 vur.fyi
Probably you are the one of the best lab in the world.
Would it be possible to share the slides? The video is a bit dark and hard to see.
Amazing summer school. I am really thank you for sharing this special presentation courses...
Zabijácííííííí 🐲🐲🐲
Bruh
Could they be equipped with night vision cameras & operated in the dark? After that it would be pretty easy to attach a stun gun. What new problems would that create? Is this really a good idea?
Nope.
Based on the name you give--Fully autonomous UAV swarm in a forest without GPS or communication,i can not get the acess to your paper from google scholar, is the name right ?,tks
The paper related to this experiment is still under review.
@@afxale Thanks!
@@DavidLee-bp3pi the paper is pubished. You can find a copy at mrs.felk.cvut.cz/people/afzal-ahmad.
You ass, you first said Trump didn't get majority, then you said Trump is the mascot of majority, just pick one. Moreover, Trump has come with an election, so with votes, not by the majority as you said. However you put him in the opposite model on purpose.
We live in a society
Great work!
👏
fantastic work ! will u release the paper or code?
Paper is in the review process, hopefully it will be released soon.
Hey, the paper is now available at iopscience.iop.org/article/10.1088/1748-3190/abc6b3.
Very cool! If there are any papers or projects details online?
Paper is in the review process, hopefully it will be released soon.
Hey, the paper is now available at iopscience.iop.org/article/10.1088/1748-3190/abc6b3.
Very cool. more content please. Also, I want To be youtube friends :D
Nice, is it possible to get a copy of the master theis?
Yes, a copy of the thesis is available here: drive.google.com/file/d/1kMO-4UOnDf0ggzf641S6DrlqpX_tZBqY/view?usp=sharing the results are also planned to be published in an upcoming paper.
@@ctu-mrs Thank you!
ЧВУТ - великий университет!