Thank you again. Question#1: Why do you upsample by a factor of 2 and what is the purpose of upsampling in a top down fashion please at 13:10? Question#2: Also may you please add a little what is aliasing effect you mentioned in 13:50? Do you mean because we up-sampled the feature maps by 2, the features become very close to each other, which is the aliasing effect if I am not wrong? Why the 3x3 Conv filter you applied solves aliasing effect please? I am new to this area?
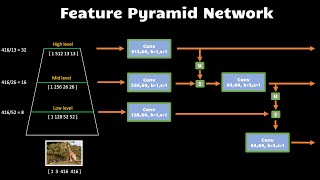
Sorry for so late to response. Up-sampling by a factor of 2 in a top-down fashion is to make the feature map with the same dimension to the bottom one. The two features maps with the same dimension can perform element-by-element addition so as to propagate semantics from top to bottom.
Thank you very much. May I know pleae why you said at 4:16 that The detection of a large object is from the large pyramidal level while the detection of a small object is from the lower pyramidal level?
Since the low pyramidal level has a high resolution, it is feasible to detect small objects. In other words, high pyramidal levels obtained from convolution operations generally have a lower resolution because of sub-sampling. This makes the feature of the small objects in higher layers in-visible.
May I know please what is dense scale sampling in simple terms at 4:27? Also, why we should use a feature map from the last convolution neural network for prediction please?









Thanks for the lecture. It is very concise and clear.
Thanks for your recognition. You are so welcome ^^
Hi Professor Shih-Shinh Huang, thank you for this explanation. Clear and helpful.
Thanks a lot ^^
Love your detailed illustrations and concise explanations.
Thanks a lot. We are really happy that you like our video.
Very clear.
Thanks a lot
Great explanation! Incredibly clear! Thank you
Thanks a lot for your comments
Thank you again. Question#1: Why do you upsample by a factor of 2 and what is the purpose of upsampling in a top down fashion please at 13:10?
Question#2: Also may you please add a little what is aliasing effect you mentioned in 13:50? Do you mean because we up-sampled the feature maps by 2, the features become very close to each other, which is the aliasing effect if I am not wrong? Why the 3x3 Conv filter you applied solves aliasing effect please? I am new to this area?
Sorry for so late to response. Up-sampling by a factor of 2 in a top-down fashion is to make the feature map with the same dimension to the bottom one. The two features maps with the same dimension can perform element-by-element addition so as to propagate semantics from top to bottom.
Thank you very much. May I know pleae why you said at 4:16 that The detection of a large object is from the large pyramidal level while the detection of a small object is from the lower pyramidal level?
Since the low pyramidal level has a high resolution, it is feasible to detect small objects. In other words, high pyramidal levels obtained from convolution operations generally have a lower resolution because of sub-sampling. This makes the feature of the small objects in higher layers in-visible.
@@quarter2018 Thank you.
May I know please what is dense scale sampling in simple terms at 4:27? Also, why we should use a feature map from the last convolution neural network for prediction please?
The feature map at the last conv. layer is the most semantic and is suitable for detection purposes.
@@quarter2018 Thank you, so what about dense scale sampling at 4:27, may I know its purpose please?
How FPN produces feature pyramid please in 6:05?
It propagates semantics from high level down to low level.