
- 16
- 7 626
AISLab@USTC
Registrace 17. 06. 2023
IDSI-SO: A Multi-Agent Safe RL Navigation Based on Threat Assessment in Dynamic Environments(New)
New video in 20240422.
Abstract: Achieving efficient and safe navigation of multiple agents in complex environments is significant for future transportation. Challenges of multi-agent navigation are as follows: First, it is difficult to obtain safe navigation policies when the dimension of observation/action space increases rapidly with the number of agents; second, the algorithm needs to deal with complex static obstacles in realistic scenes; third, the interaction avoidance between agents is not clear. In this work, we propose IDSI-SRL-ORCA (IDSI-SO for short hereafter), a multi-agent safe reinforcement learning navigation method. Interactive Driving Safety Index (IDSI) is a general method for analyzing observation in navigation and reducing its dimensional space. It performs a threat assessment based on observations of dynamic obstacles. IDSI considers the effect of interaction between agents on safety estimation and reduces the computation of field intensities in DSI. IDSI-SO uses threat attention and opponent modeling to extract useful information from raw sensors based on threat assessment from IDSI. This reduces the dimensionality of observations for reinforcement learning and ultimately improves training efficiency. Experiments show that IDSI-SO reduces the average threat by 13.4% compared to SRL-ORCA and obtains a success rate of 94.5% in complex scenarios.
Abstract: Achieving efficient and safe navigation of multiple agents in complex environments is significant for future transportation. Challenges of multi-agent navigation are as follows: First, it is difficult to obtain safe navigation policies when the dimension of observation/action space increases rapidly with the number of agents; second, the algorithm needs to deal with complex static obstacles in realistic scenes; third, the interaction avoidance between agents is not clear. In this work, we propose IDSI-SRL-ORCA (IDSI-SO for short hereafter), a multi-agent safe reinforcement learning navigation method. Interactive Driving Safety Index (IDSI) is a general method for analyzing observation in navigation and reducing its dimensional space. It performs a threat assessment based on observations of dynamic obstacles. IDSI considers the effect of interaction between agents on safety estimation and reduces the computation of field intensities in DSI. IDSI-SO uses threat attention and opponent modeling to extract useful information from raw sensors based on threat assessment from IDSI. This reduces the dimensionality of observations for reinforcement learning and ultimately improves training efficiency. Experiments show that IDSI-SO reduces the average threat by 13.4% compared to SRL-ORCA and obtains a success rate of 94.5% in complex scenarios.
zhlédnutí: 41
Video


A Non-Homogeneity Mapless Navigation Based on Hierarchical Safe RL in Dynamic Environments (New)
zhlédnutí 27Před měsícem
New video in 20240325

A Non-Conservative Uncertainty Bound of Gaussian Process for Motion Control in Robotics
zhlédnutí 56Před měsícem
Abstract: One pivotal aspect of Gaussian process-based robot control lies in leveraging uncertainty bounds for controller design and analysis. However, existing uncertainty bounds often exhibit excessive conservativeness, leading practitioners to substitute heuristics for them. In this letter, we introduce a novel approach to derive a non-conservative uncertainty bound (NCUB) based on Lipschitz...

Optimal Motion Planning under Dynamic Risk Region for Safe Human-Robot Cooperatio
zhlédnutí 48Před 2 měsíci
As the development of factory automation, the workers and the robots are inevitable to collaborate in close proximity in a shared workspace, which makes the assurance of human safety a top priority. This work proposes a novel optimal motion planning framework for the manipulator to realize safe human-robot cooperation. To deal with the difficulties induced by the uncertainty and the sudden chan...
PE-Planner: A Performance-Enhanced Quadrotor Motion Planner for Autonomous Flight
zhlédnutí 245Před 3 měsíci
Video submission to IEEE Robotics and Automation Letters (version 2) The role of a motion planner is pivotal in quadrotor applications, yet existing methods often struggle to adapt to complex environments, limiting their ability to achieve fast, safe, and robust flight. In this letter, we introduce a performance-enhanced quadrotor motion planner designed for autonomous flight in complex environ...

A Non-Homogeneity Mapless Navigation Based on Hierarchical Safe RL in Dynamic Complex Environments
zhlédnutí 57Před 3 měsíci
Our new video for 25 March 2024 is at czcams.com/video/24h9JmcIfMw/video.html Abstract:Addressing safe and efficient navigation in dynamic, realistic, and complex environments stands as a pivotal inquiry within the realm of robotics. Recently, numerous learning-based methods are introduced into the field of navigation, yielding notable outcomes. In this letter, we propose a hierarchical safe re...

Differential Game-based Control for Nonlinear HRI System with Unknown Desired Trajectory
zhlédnutí 42Před 3 měsíci
Differential game is an effective technique to describe the negotiation between humans and robots, which is widely used to realize trajectory tracking in human-robot interaction (HRI). However, most existing works consider the control-affine HRI systems and assume the desired trajectory is available to both human and robot, which limits the scope of applications. To overcome these difficulties,...

Tightly Coupled VIO with Robust Feature Association in Dynamic Illumination Environments
zhlédnutí 179Před 3 měsíci
This paper focuses on the feature-based visual-inertial odometry in dynamic illumination environments. While the performance of most existing feature-based visual-inertial odometry methods is degraded by the dynamic illumination which leads to unstable feature association, we propose a tightly coupled visual-inertial odometry named RAFT-VINS. The key module of this odometry is a lightweight opt...

Ensuring Safety in LLM-Driven Robotics: A Cross-Layer Sequence Supervision Mechanism
zhlédnutí 154Před 3 měsíci
Integrating Large Language Models (LLMs) into robotics significantly enhances autonomous task planning. However, ensuring that multi-step task plans (action sequence) generated by LLMs comply with pre-defined safety constraints during planning and execution remains a challenge, limiting their adaptability in complex environments. To address this issue, a mechanism that can monitor and adjust th...
Eye Movement-Based Human-Swarm Interaction for Coverage Control of Mobile Robots with Constraints
zhlédnutí 67Před 5 měsíci
Inspired by search and rescue tasks in hazard environments with mixed human and robots teams, we develop a human-swarm interaction scheme for coverage control of mobile robots in a non-convex and closed 2D area. Motivated by releasing the manual operations of a human, we develop two eye movement based interaction modes, namely eye gazing mode and eye tracking mode, which uses Gaussian functions...
PE-Planner: A Performance-Enhanced Quadrotor Motion Planner for Autonomous Flight
zhlédnutí 330Před 5 měsíci
Video submission to IEEE Robotics and Automation Letters The role of a motion planner is pivotal in quadrotor applications, yet existing methods often struggle to adapt to complex environments, limiting their ability to achieve fast, safe, and robust flight. In this letter, we introduce a performance-enhanced quadrotor motion planner designed for autonomous flight in complex environments includ...
IDSI-SO: A Multi-Agent Safe RL Navigation Based on Threat Assessment in Complex Dynamic Environments
zhlédnutí 71Před 5 měsíci
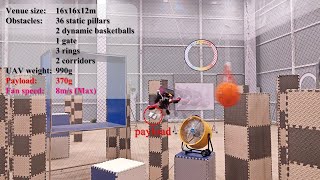
Our new video for 22 April 2024 is at the URL: czcams.com/video/MS7MvA3gpS4/video.html Video submission to IEEE Transactions on Industrial Electronics. Achieving efficient and safe navigation of multi-agents in dynamic and complex environments is significant for future transportation. The challenges of multi-agent navigation are as follows: first, it is difficult to obtain safe navigation polic...
Camera Network-Based Visual Servoing for Aerial Interceptor Quadrotors
zhlédnutí 78Před 7 měsíci
The problem of how to effectively track and intercept small aircraft that break into the no-fly zones is now attracting increasing interest in robotics society. Vision-based control has been proved an effective solution to the target tracking problem for Unmanned Aerial Vehicles (UAVs). Due to the limited field of view (FOV) of onboard vision sensors, existing works assume that the target is al...
Slip Detection and Recovery for Quadruped Robots via Orthogonal Decomposition
zhlédnutí 6KPřed 7 měsíci
Locomotion on surfaces with insufficient friction poses a significant challenge for quadruped robots. Regular legged control methods derive contact forces by assuming stationary foot contact, which is no longer valid under slippery conditions. This article addresses this issue by designing a systematic anti-slip approach with a proprioceptive slip detector and a hybrid position/force slip recov...
Robust SL in An Unknown Environment: An Uncertainty-Separated Control Barrier Function Approach
zhlédnutí 85Před 11 měsíci
A main challenge restricting the application of control barrier functions (CBFs) to complex scenarios is the absence of robustness against uncertainties induced by both measurements of the environment and robot dynamics. In this paper, we propose an uncertainty-aware, learning-based approach to construct a safe controller such that safety can be guaranteed with a high probability in a complex a...
SRL-ORCA: A Socially Aware Multi-Agent Mapless Navigation Algorithm In Complex Dynamic Scenes
zhlédnutí 257Před rokem
SRL-ORCA: A Socially Aware Multi-Agent Mapless Navigation Algorithm In Complex Dynamic Scenes
emmm seems not even able to beat OKVIS(arxiv.org/pdf/2212.07595), which is 10 years ago visual-inertial SLAM, No matter how you justify. PLSLAM OKVIS AIRVO RAFT-VINS conference-csc1 2.6974 1.1181 0.5236 1.69 conference-csc2 1.5956 0.4696 0.1607 0.61 third-floor-csc1 4.4779 0.2525 0.1760 0.29 third-floor-csc2 6.0675 0.2161 0.1312 0.23
太强了,请问老师组里招保研生嘛
didn't compare with other method like AirVO
Thank you very much for your comment. We have compared the performance of the RAFT-VINS and the feature tracking method we proposed with exiting ones to highlight their effectiveness as shown in the video. To be specific, we compare our RAFT-VINS with VINS-Mono and ORB-SLAM3 to demonstrate its capability in providing trustable pose estimates in challenging dynamic illumination environments. As for the AirVO that you mentioned, it is a stereo visual odometry which utilizes learning-based point features and improved line features to achieve competitive results in dynamic illumination environments. We have also considered comparing our method with it. However, our method is a type of visual-inertial odometry, making it unfair to compare with visual-only odometry such as the AirVO, since the introduction of the IMU measurements can also improve the performance of VO under dynamic illumination conditions. That is, if the comparison result shows that our method performs better than AirVO, it doesn't necessarily attribute solely to the feature tracking method we designed; it could also be due to the influence of the IMU measurements. As a result, we have not compare our method with the AirVO when the design of the optical flow network for feature tracking is the key contribution of our work. If we aim to compare our method with AirVO to show whether the newly designed feature tracking method works better under the dynamic illumination than the AirVO, we have to remove the IMU from our VIO system.
waiting for opensource codes
You can ask Boston dynamics.
Nice work, any chance for a link to the paper and perhaps the git repo ?