
- 8
- 9 190
NeuroMANCER
United States
Registrace 28. 12. 2022
Channel for the NeuroMANCER: a scientific machine learning library.
NeuroMANCER allows you to formulate and solve parametric constrained optimization problems, physics-informed system identification, and parametric model predictive control.
github.com/pnnl/neuromancer
NeuroMANCER allows you to formulate and solve parametric constrained optimization problems, physics-informed system identification, and parametric model predictive control.
github.com/pnnl/neuromancer
All you need to know about model predictive control for buildings
Brief overview and highlights of the paper, "All you need to know about model predictive control for buildings".
Open-access link:
www.sciencedirect.com/science/article/pii/S1367578820300584
Cite as:
Ján Drgoňa, Javier Arroyo, Iago Cupeiro Figueroa, David Blum, Krzysztof Arendt, Donghun Kim, Enric Perarnau Ollé, Juraj Oravec, Michael Wetter, Draguna L. Vrabie, Lieve Helsen, All you need to know about model predictive control for buildings, Annual Reviews in Control, Volume 50, 2020, Pages 190-232, ISSN 1367-5788
This work emerged from the IBPSA Project 1, an international project conducted under the umbrella of the International Building Performance Simulation Association (IBPSA). Project 1 develops and demonstrates a BIM/GIS and Modelica Framework for building and community energy system design and operation. This research was partially supported by the Assistant Secretary for Energy Efficiency and Renewable Energy, Office of Building Technologies of the U.S. Department of Energy, under Contracts nos. DE-AC05-76RL01830, and DE-AC02-05CH11231. The authors acknowledge the financial support by the European Union through the EU-H2020-GEOT€CH project ’Geothermal Technology for €conomic Cooling and Heating’ and within the H2020-EE-2016-RIA-IA programme for the project ’Model Predictive Control and Innovative System Integration of GEOTABS;-) in Hybrid Low Grade Thermal Energy Systems - Hybrid MPC GEOTABS’ (grant number 723649 - MPC-; GT), and the H2020 programme under Grant Agreement No. 731231 Flexible Heat and Power. The work of Javier Arroyo is financed by Vlaamse Instelling voor Technologisch Onderzoek (VITO) through a Ph.D. Fellowship under the grant no. 1710754.
Open-access link:
www.sciencedirect.com/science/article/pii/S1367578820300584
Cite as:
Ján Drgoňa, Javier Arroyo, Iago Cupeiro Figueroa, David Blum, Krzysztof Arendt, Donghun Kim, Enric Perarnau Ollé, Juraj Oravec, Michael Wetter, Draguna L. Vrabie, Lieve Helsen, All you need to know about model predictive control for buildings, Annual Reviews in Control, Volume 50, 2020, Pages 190-232, ISSN 1367-5788
This work emerged from the IBPSA Project 1, an international project conducted under the umbrella of the International Building Performance Simulation Association (IBPSA). Project 1 develops and demonstrates a BIM/GIS and Modelica Framework for building and community energy system design and operation. This research was partially supported by the Assistant Secretary for Energy Efficiency and Renewable Energy, Office of Building Technologies of the U.S. Department of Energy, under Contracts nos. DE-AC05-76RL01830, and DE-AC02-05CH11231. The authors acknowledge the financial support by the European Union through the EU-H2020-GEOT€CH project ’Geothermal Technology for €conomic Cooling and Heating’ and within the H2020-EE-2016-RIA-IA programme for the project ’Model Predictive Control and Innovative System Integration of GEOTABS;-) in Hybrid Low Grade Thermal Energy Systems - Hybrid MPC GEOTABS’ (grant number 723649 - MPC-; GT), and the H2020 programme under Grant Agreement No. 731231 Flexible Heat and Power. The work of Javier Arroyo is financed by Vlaamse Instelling voor Technologisch Onderzoek (VITO) through a Ph.D. Fellowship under the grant no. 1710754.
zhlédnutí: 634
Video


Parameter estimation of ordinary differential equations in NeuroMANCER
zhlédnutí 2,4KPřed rokem
Differentiable models such as Neural ordinary differential equations (NODEs) or neural state space models (NSSMs) represent a class of black box models that can incorporate prior physical knowledge into their architectures and loss functions. Examples include structural assumption on the computational graph inspired by domain application, or structure of the weight matrices of NSSM models, or n...

Introduction to NeuroMANCER Scientific Machine Learning Library
zhlédnutí 2,3KPřed rokem
NeuroMANCER is a Pytorch-based framework for solving parametric constrained optimization problems, physics-informed system identification, and parametric model predictive control. open-source code: github.com/pnnl/neuromancer Developed by the team at PNNL: Aaron Tuor, Jan Drgona, Mia Skomski, Stefan Dernbach, James Koch, Zhao Chen, Christian Møldrup Legaard, Draguna Vrabie This work was partial...

Differentiable Predictive Control with Safety Guarantees: A Control Barrier Function Approach
zhlédnutí 1,9KPřed rokem
About: We develop a novel form of differentiable predictive control (DPC) with safety and robustness guarantees based on control barrier functions. DPC is an unsupervised learning-based method for obtaining approximate solutions to explicit model predictive control (MPC) problems. In DPC, the predictive control policy parametrized by a neural network is optimized offline via direct policy gradi...

Differentiable Optimization as Lingua Franca for Scientific Machine Learning - Sandia MLDL Workshop
zhlédnutí 151Před rokem
Title: Differentiable Optimization as Lingua Franca for Scientific Machine Learning About: In this talk, we introduce a differentiable programming-based method called differentiable predictive control (DPC) for learning domain-aware neural dynamical systems and constrained control laws for unknown nonlinear systems. Presenter: Jan Drgona Venue: Sandia MLDL Workshop This research was partially s...

Deep Learning Explicit Differentiable Predictive Control Laws for Buildings
zhlédnutí 297Před rokem
About: We demonstrate the use of differentiable predictive control (DPC) methodology for learning constrained neural control laws for building thermal comfort control. Authors: Jan Drgona, Aaron Tuor, Soumya Vasisht, Elliott Skomski, Draguna Vrabie Venue: 7th IFAC Conference on Nonlinear Model Predictive Control 2021 paper: www.sciencedirect.com/science/article/pii/S2405896321012933 This resear...
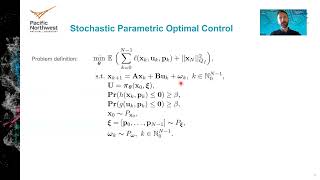
Learning Stochastic Parametric Differentiable Predictive Control Policies
zhlédnutí 247Před rokem
About: The problem of synthesizing stochastic explicit model predictive control policies is known to be quickly intractable even for systems of modest complexity when using classical control-theoretic methods. To address this challenge, we present a scalable alternative called stochastic parametric differentiable predictive control (SP-DPC) for unsupervised learning of neural control policies g...

Neural Lyapunov Differentiable Predictive Control
zhlédnutí 1,3KPřed rokem
About: In this work, we simultaneously learn neural control policies and neural Lyapunov functions by differentiating the constrained optimal control problem. This leads to stabilizing neural policies that respect state and action constraints. Authors: Sayak Mukherjee, Ján Drgoňa, Aaron Tuor, Mahantesh Halappanavar, Draguna Vrabie Venue: 61st IEEE Conference on Decision and Control Paper: arxiv...
Thank you sir for making this vid, i have a question for you : Can I import and use a pre-trained model with TensorFlow?
Not by default, but I would search online to see how to import TensorFlow models into Pytorch medium.com/huggingface/from-tensorflow-to-pytorch-265f40ef2a28
Thanks a lot! But I can't find the Documentation.pdf in Github, Could you please send me a new link of the PDF?Thank you !
Thanks for the inquiry. The documentation has been moved to here: pnnl.github.io/neuromancer/
@@neuromancer_SciML Thank you so much!
Very impressive work Jan!
Thank you!
I have a complicated grey physics box for my dynamics which is not pytorch supported. Actually, the function is generated from casadi. For parameters which exist within this box, how can i use this box with the 'requires_grad nn parameters'??
For parameter estimation of ODEs and gray-box universal differential equations (UDEs) see our examples in: github.com/pnnl/neuromancer/tree/master/examples/ODEs For a more detailed response please open a new discussion under Q&As and provide more details about your use case github.com/pnnl/neuromancer/discussions
Great presentation!
Thanks. Can we use a learned pytoch model as dynamics for the model predictive control in Neuromancer?
By all means, please see example 4 in our control examples: github.com/pnnl/neuromancer#control
Can we use the Neuromancer software with jupyter notebook ?
Absolutely yes. See our current google colab examples github.com/pnnl/neuromancer/tree/master#features-and-examples
great video
Thank you! I am glad you found it useful.
I plan to do black box system identification. Does the MLP work in place of duffing parameter in this example?
Hi Pallavi. Certainly so. We have two examples of black-box system ID using MLPs in neural ODEs and neural state space models github.com/pnnl/neuromancer/blob/master/examples/system_identification/two_tank_node.py github.com/pnnl/neuromancer/blob/master/examples/system_identification/two_tank_neural_ssm.py hope that helps :)
@@neuromancer_SciML I tried running the first example and I am stuck at Ambiguous Look up error .
This error is obtained when I try to obtain yhat.
@@pallavighimire6809 can you please create an issue on GitHub with a complete error message and description of your environment setup? Thank you.
@@pallavighimire6809 Can you please create an issue on github with full error message and description of you setup?
Thank you for the content. Can you by any chance do another example of Nonautonomous system identification where the system is not fully observable ?
Hi Abdullah, thank you for the inquiry. We will prepare this example for the upcoming release. As of now, we have one example that allows you to use different types of learnable embeddings to estimate the latent state of the dynamical system. github.com/pnnl/neuromancer/blob/master/examples/system_identification/two_tank_neural_ssm.py you can check line #78 for the estimator options and line #166 for the instantiation of these estimators, which are implemented here: github.com/pnnl/neuromancer/blob/bc45a2772009303da6aac129617d82dec08e7d7e/neuromancer/estimators.py
It is a great piece of software you built. I would like to try it, but I am a fervorous Julia user in sciml. What are the advantage of this package over Julia sciml ecosystem (Diffeqflux, optimization.jl, Differential equations.jl, SciMLsensitivity.jl)?
Thank you, Vinicius. Our framework is to a great extent inspired by Julia's SciML ecosystem. I am a big fan of Julia :) What we aim to create with NeuroMANCER is an open-source ecosystem for SciML in PyTorch that will allow for easy integration of user-defined AI models with constrained optimization for dynamical systems and parametric optimal control. What is unique about NeuroMANCER is that it aims to integrate all of these domains in a single SW framework. We do so by providing high-level symbolic mathematical language used in the constrained optimization frameworks on top of Pytorch modules and callables. We are currently conducting active research in the "learning to optimize with constraints" and "learning for model-based optimal control" and aim to continuously expand our library in this direction. Compared to what we provide, Julia packages are light years ahead in the differential equation capabilities, numerical solvers, and overall performance. Our framework is a young research project, but we hope to attract the interest of the Python community to facilitate open-source development and integration of the latest SciML methods that are being developed in PyTorch.
@@neuromancer_SciML I really appreciate your prompt and rich answer. these are great features and plans for the framework . I will play with it a bit to get familiar and maybe I can reach a level that allows me to contribute to it. Julia sciml ecosystem has been built over many years from many developers, so it's just a matter of time for Neuromancer to get as many feature as Julia. Really appreciate the things you are doing. Congratulations!!
@@viniciusviena8496 Thank you so much! We would be most happy to attract the interest of the open-source community. All feedback and contributions are most welcome! There is much to develop and improve :)
Thanks Jan for making these videos! They will be very helpful! I am also sharing with my colleagues.
Thanks Omkar! If you run into any issues or you have a feature request, please post it on our github repo.
Really Interesting!